![[灵蜂智能官网]-专业红外热像仪厂家](http://linfun.com.cn/wp-content/uploads/2022/06/2022060807191642.png)
![[灵蜂智能官网]-专业红外热像仪厂家](http://linfun.com.cn/wp-content/uploads/2021/10/202110130602107.png)
应用方案—机器人在甘蔗农作物里使用红外热像仪实现快速导航
农业机器人技术面临的主要挑战之一是应对不同环境类型的自主导航。尽管已经为小型露天场所和结构化的室内设施(例如温室和苗圃)合理地提出了该问题的几种解决方案,但是对于大型非结构化且密集的草类作物(例如甘蔗、小麦、玉米、大麦)环境而言却难以解决。因为与普通的农田不同,甘蔗农场通常是广阔的,可容纳许多密集且难以接近的排田隧道。此外,甘蔗作物处在恶劣的地区,这阻碍了雇用人员和重型机械进行制图,监测和取样的后勤工作。
一般用于农作物的机器人为智能生物能源农业坦克,旨在甘蔗田中执行许多农业任务。但是该机器人的导航问题尤为突出,例如(i)需要穿越狭窄的农作物走廊,地形不平坦,叶子被困,GPS覆盖率差并且难以解释RGB相机或激光器的数据;(ii)尽管存在非完整系统的运动控制和路径规划方面的相关研究,但由于该行驶曲线需要滑移现象,因此滑移效应分析尚不成熟;(iii)基于其低成本的设计理念,导致了有限的硬件和处理能力。
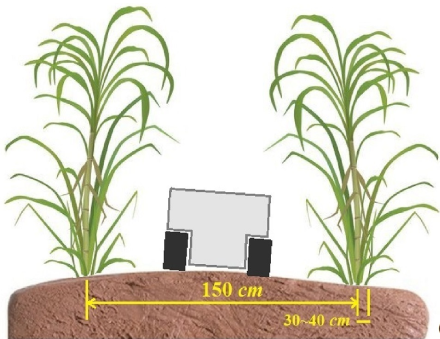
图为智能生物能源农业坦克
在这项工作中,挪威生命科学大学科学技术学院的科学家为在甘蔗农作物中运行的移动机器人开发了基于红外热成像的导航方法。关键思想是结合运动学建模方法、机器人定位技术、红外热成像技术、轨迹规划算法和运动控制策略等不同的学科领域,创建一种自主导航解决方案,以确保成功执行农业领域的监视任务。红外热图像提供易于检测的功能,它可以检测从物体自然发出的热辐射,因此可以分配主动源,将热能传输到目标,从而减轻了基于激光的制图所带来的生命危险。与匹配的RGB图像相比,能够收集更多的现场数据,以帮助我们更好地了解不同的日光/天气条件(例如,夜晚,雨天,雾天,季节)下的环境热剖面,并绘制土壤和作物之间热对比度差的组合图。通过从现场收集的热图像和数值模拟推断出生成的路径进行验证和确认。具有更高的可靠性。在甘蔗作物中进行的初步实验测试也说明了所建议的导航方法的效率和可行性,该方法由不同的实施阶段组成。

图为机器人拍摄的红外图像和彩色图像
参考资料:
Marco F. S. Xaud1, Antonio C. Leite and Pal J. From. Thermal Image Based Navigation System for Skid-Steering Mobile Robots in Sugarcane Crops [C]. 2019 IEEE International Conference on Robotics and Automation (ICRA). 2019.