![[灵蜂智能官网]-专业红外热像仪厂家](http://linfun.com.cn/wp-content/uploads/2022/06/2022060807191642.png)
![[灵蜂智能官网]-专业红外热像仪厂家](http://linfun.com.cn/wp-content/uploads/2021/10/202110130602107.png)
随着城市建设的不断发展,城市地下综合管廊的建设不断增多。地下综合管廊也是城市的超级大动脉,给城市带来从内到外的活力。但由于地下管线建设规模不足、管理水平较低等问题,使得一些城市相继发生大雨内涝、管线泄漏爆炸、路面塌陷、设施被盗等事件,从而严重影响了人民群众生命安全和城市运行秩序。综合管廊红外热成像巡检机器人监测系统,是专门针对地下综合管廊研发设计的智能一体化巡检方案。系统以综合管廊智能巡检机器人为核心,同时结合强大的红外热像仪、远程监控平台、数据服务器以及相关附件,可实现对综合管廊环境与设备的不间断的往返监控监测及应急火灾报警和处置。
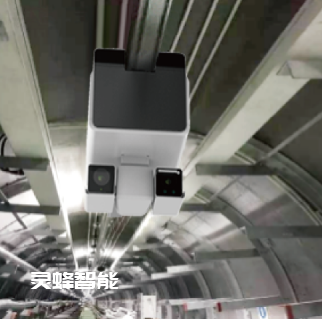
图为管廊红外热成像巡检机器人
红外热成像机器人本体主要由图像采集系统、语音对讲及应急广播系统、环境检测系统、自主防撞与避障系统、精准定位系统和人员检测跟踪系统等组成,设计系统如下。
1)图像采集系统
图像采集系统搭载一体化高性能云台摄像机,集成高清摄像技术与红外热成像技术,可实现低照度下清晰成像。球机具有6条巡航扫描,每条可设置16个预置点,预置时间可调;旋转垂直角度可从-20°(俯视)到+90°(仰视)变化,水平角度为360°,可连续旋转,无监视盲区。
2)语音对讲及应急广播系统
机器人本体搭载先进的双向语音对讲系统,可实现实时对讲,对讲声音在110分贝以上。同时配备大口径镀金震膜咪头,本底噪声极低,采音更广泛。自适应动态降噪处理技术,内置高速DSP数字信号处理器。独特设计的“电子噪声动态闭环抑制电路”,彻底消除“嘶嘶”电子噪音。监听范围:5~80m2,灵敏度可调。紧急事故发生时,如检测到火光或者超温情况,机器人本体具备报警指示功能及机器人状态指示功能。
3)环境检测系统
巡检机器人环境监测系统可对管廊的环境参数进行检测,监测范围包括:可同时对O2、CO、H2S和CH4等4种气体的浓度进行检测和超限报警;可完成环境温度、湿度的检测,检测范围为:温度-40℃~+123.8℃;湿度为:0%~100%RH;另外可对烟雾、光照度以及火焰进行监测。
4)自主防撞与避障系统
机器人本体带有自主防撞与避障系统,采用超声波探测,可对障碍物和隧道内工作人员进行探测,遇到障碍自动停止并报警,同时加装安全触边,防止碰撞造成人员及设备损伤。超声波探测距离0.1~4m,探测角度120°。
5)精准定位系统
机器人采用精准里程定位,实时上传自身位置信息,并通过GIS地图实现精准定位,同时也可关联百度地图实现精准位置锁定。